Biomimetic Soft Robot
Project Goal: Develop a scaled robotic model of C. atlantica (pteropod) to study clap-and-fling lift generation. Master’s thesis project at the University of South Florida.
Client: Murphy Fluid Lab at USF · Field: Lab Research

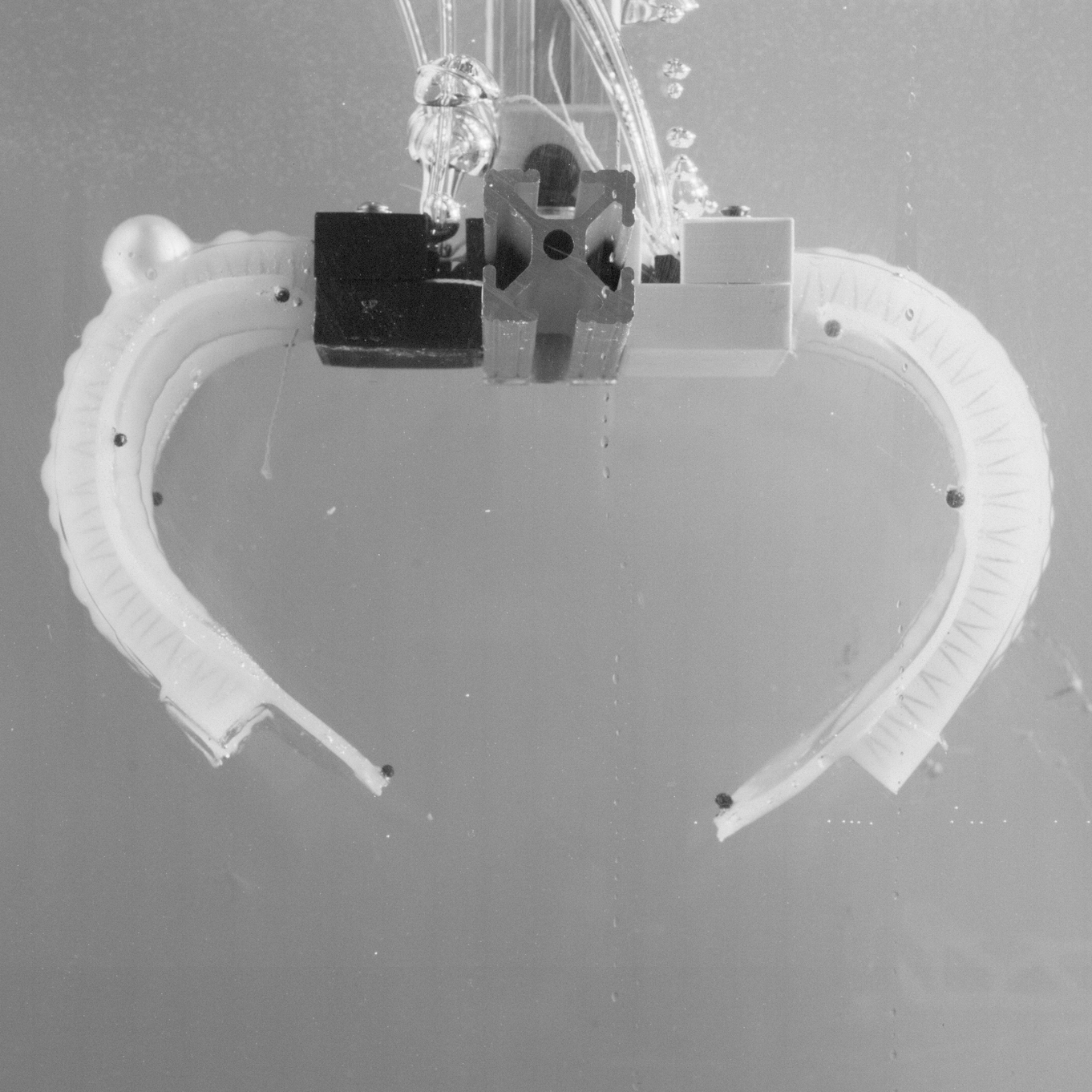
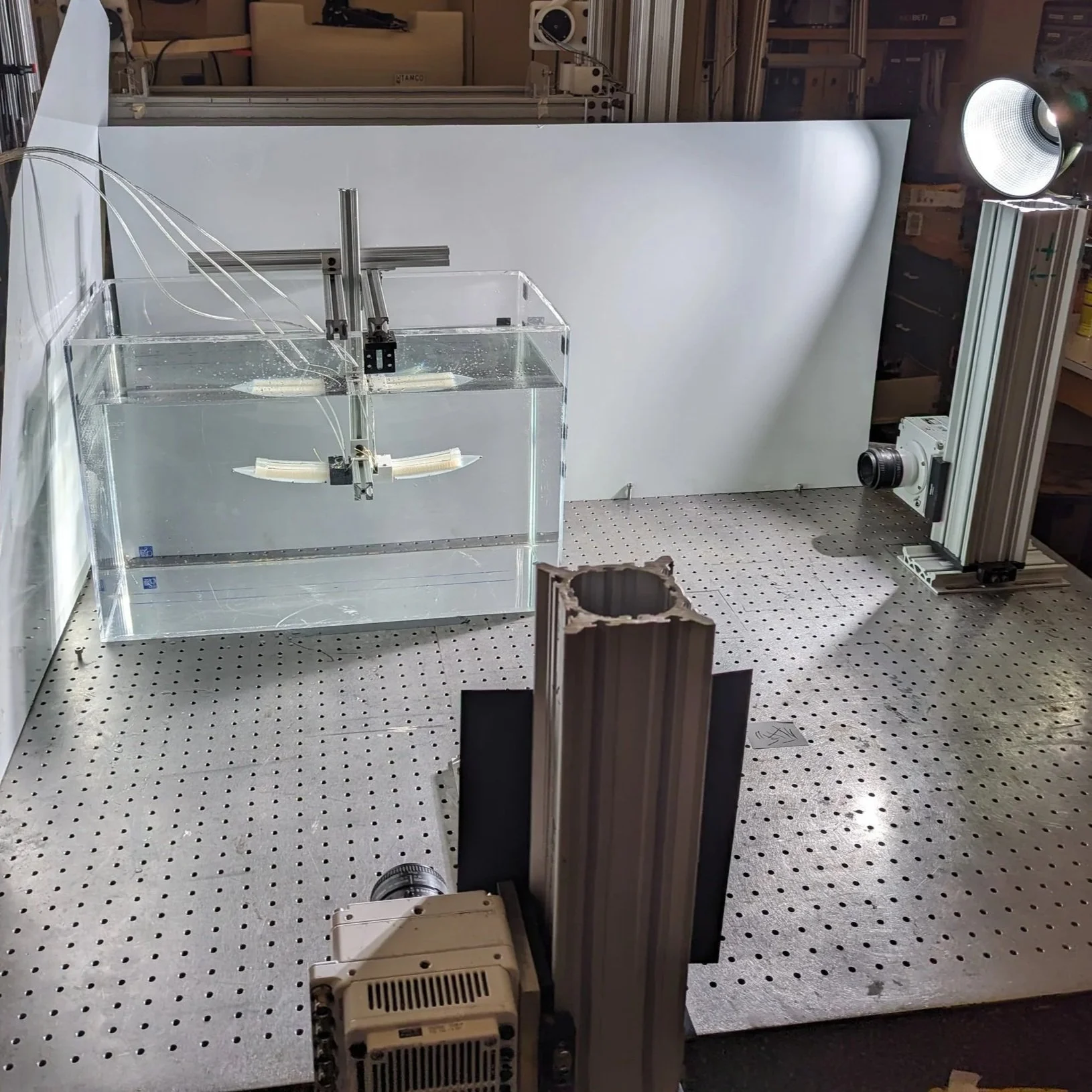
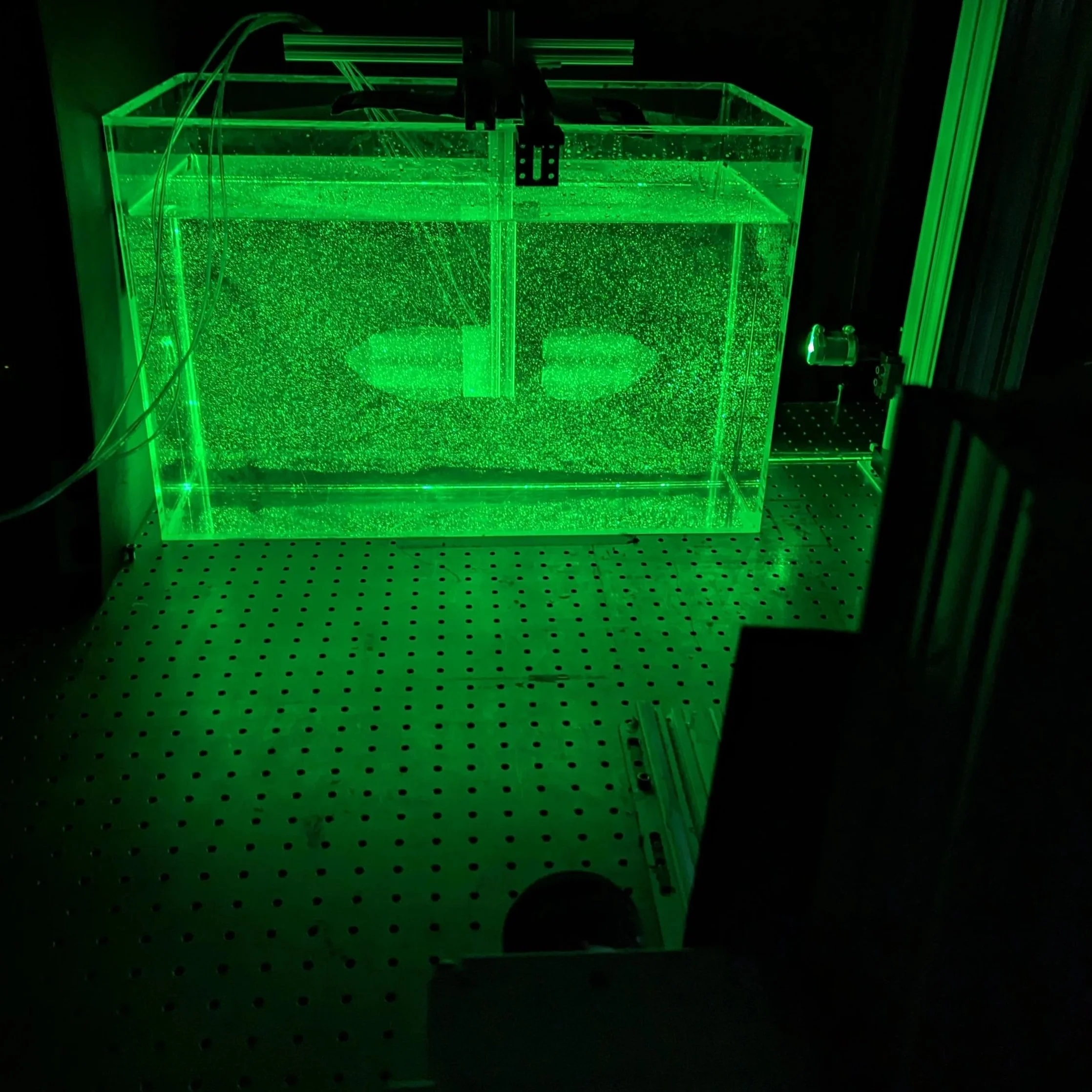
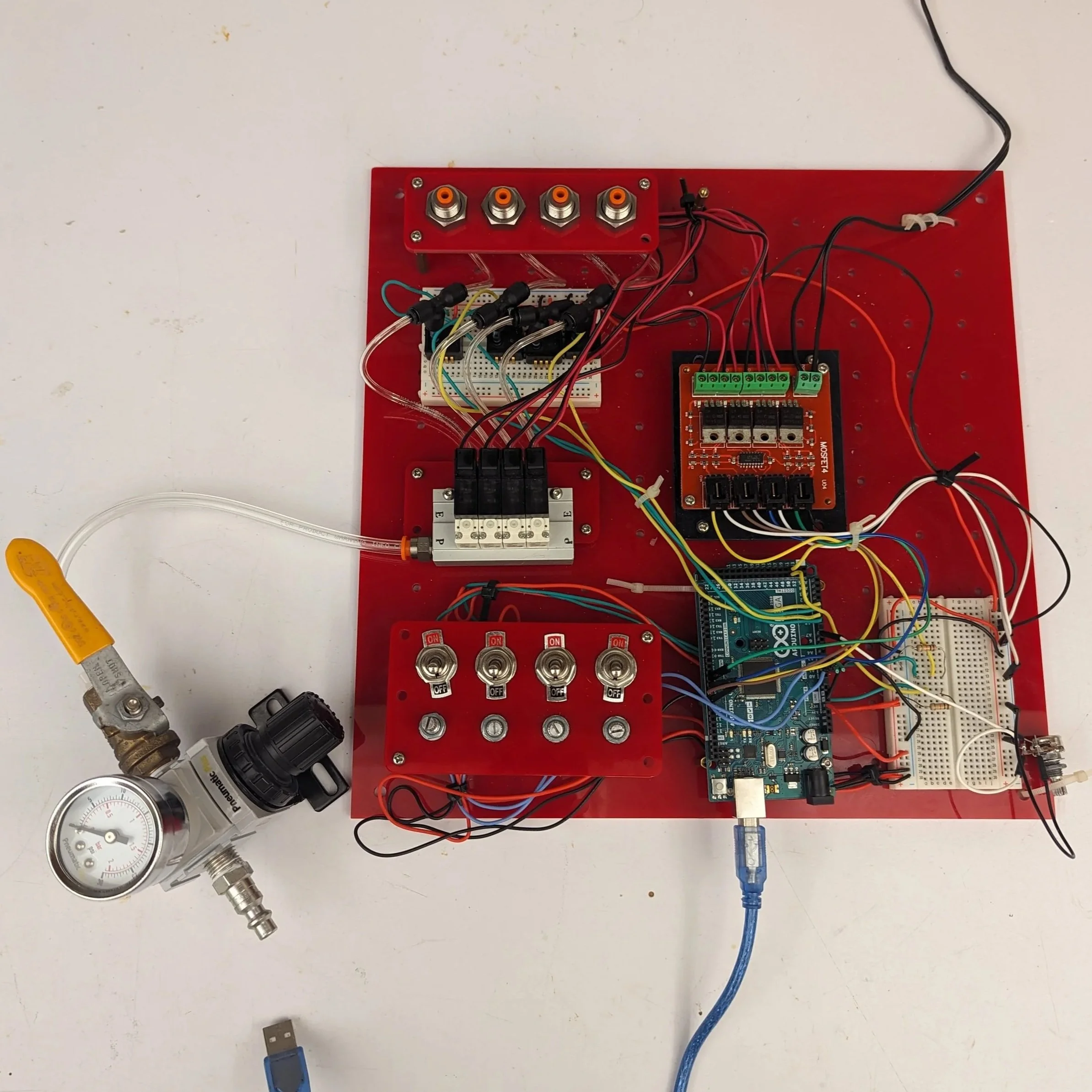
Design Approach: Analyzed biological wing motion and designed a scaled model using fluidic soft actuators to replicate kinematics while maintaining Reynolds number. Manufactured actuators using custom 3D-printed molds and cast silicone. Integrated a pressure-controlled system to deform wings in repeatable pattern, and used high-speed cameras and motion capture to analyze and refine kinematics of prototype.
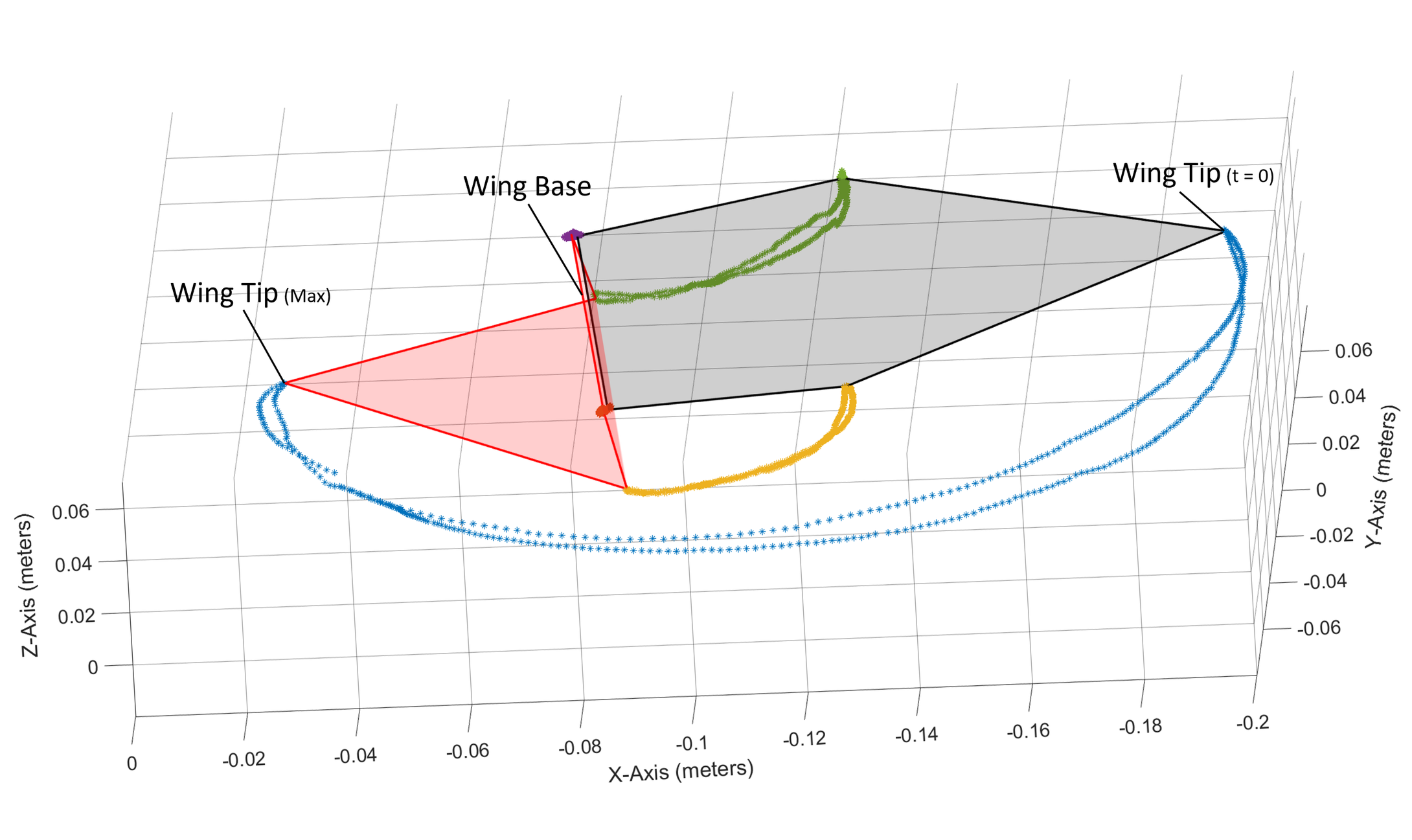

Results: Developed a functional 25x scale model reproducing pteropod wing clap-and-fling motion. Captured wing kinematics for comparison to C. atlantica’s motion, at matched Reynolds number. Quantified lift generation and flow vectors of model. Master’s thesis approved by USF board and selected for presentation at Florida Fluid Symposium 2024.
Skills Demonstrated: Literature Review · Concept Development · Prototype Creation · Electro-Mechanical System Design · Arduino Coding · Statistical Analysis
Note: Project completed as Master's thesis at University of South Florida.